This University Project was made for the UNIBO course "Ingegneria dei Sistemi Software 2019" kept by Prof. Antonio Natali (https://www.unibo.it/it/didattica/insegnamenti/insegnamento/2018/385373).
The goal of this project is available in HTML Format at userDocs/Objective/TemaFinaleBo19.html.
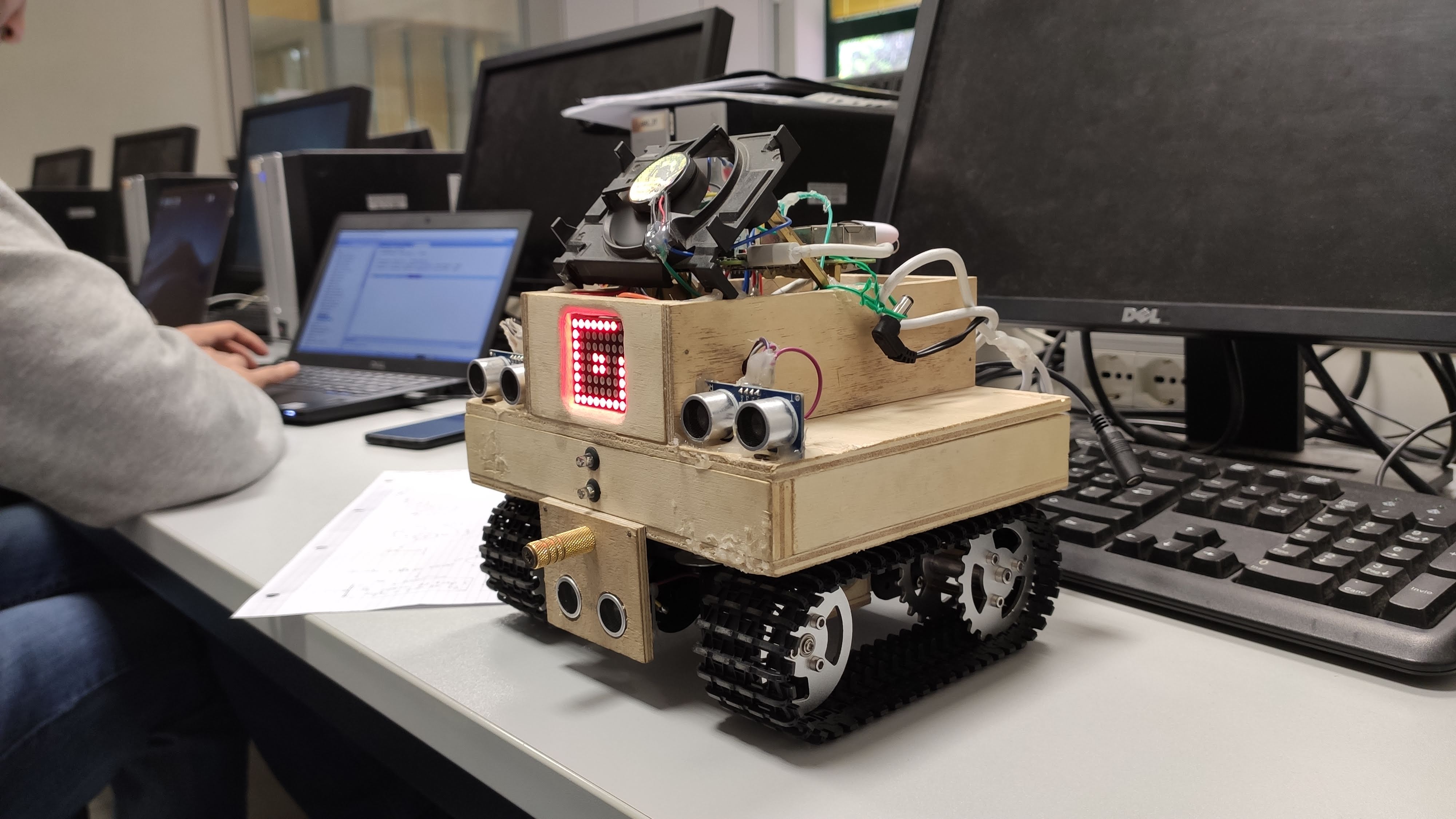
- Our Robot uses an AI Planner to dinamically calculate a sequence of moves for reaching a position.
- Our Robot also uses Prolog as a Knowledge Base.
- Everything is mainly developed using the DSL QAK Language (external DSL for generating Kotlin code) developed by Antonio Natali.
- The Robot is equipped with a Raspberry which was properly configured for this purpose.
- MQTT and CoAp are used in this project as described in the objective of this project.
- The Virtual Environment that was used to test the robot in a virtual environment was developed by Pierfrancesco Soffritti (https://pierfrancescosoffritti.com/), currently working for Google.
- Frontend is developed entirely in NodeJS.
- SCRUM was used as method for organizing our work. All our Sprints are available to be consulted. We reached the final stage of the project in a incremental way.
To launch correctly our virtual system:
-
Clonare la repository (it might require a while for some demos we pushed).
-
Aprire come progetto in Eclipse lo Sprint6 (/Sprints/Sprint6/it.unibo.sprint6).
-
Eseguire un
gradle build eclipseper sistemare le dipendenze nella cartella sprint6/it.unibo.sprint6 (è disponibile un .bat Sprint6/it.unibo.sprint6/gradleBuildEclipse.bat). -
Installare con
npm installil virtual environment (è disponibile un .bat /Sprints/it.unibo.robots19/node/WEnv/install.bat). -
Installare
npm installil frontend (è disponibile un .bat /Sprints/Sprint6/installFrontend.bat). -
Lanciare l'ambiente virtuale ed il frontend (è disponibile un .bat /Sprint6/launchFrontend&WEnv.bat).
-
Lanciare da eclipse i seguenti contesti: ctxRobot, ctxResourceModel, ctxExplorer, ctxFridge, ctxPantry, ctxDishwasher.
Note: QAK plugins (to put in Eclipse XText in Dropins folder) and Libs required available at https://github.com/anatali/iss2019Lab/tree/master/libs
Note 2: Sometimes project GIT doesn't import the file .project correctly. Be sure when you import a sprint (e.g. sprint6) the matching .project file has a string "it.unibo.sprint6" in it, or Eclipse wouldn't import the project in the right way.
If repo goes down, PM Cesarsk.
Many demos (go check it out!!) are available at Demos
Cesarano Luca https://lucacesarano.com - https://github.com/Cesarsk
Croce Andrea https://github.com/Shin94
Ferrari Andrea https://github.com/FerrariAndrea
PROLOG, IA, AI, ARTIFICIAL INTELLIGENCE, RASPBERRY, DSL, QAK, GOOGLE, VIRTUAL ENVIRONMENT, NODEJS, JAVASCRIPT, MQTT, COAP, IOT, SMART DEVICES
Check LICENSE.MD